V minulém videu jsem vám představil robotické depo Zásilkovny a svůj úkol: vytvořit tlačítko, které při stisku dokáže přes Wi-Fi kontaktovat řídící backend a roboty zastavit. Ve druhém pokračování si ukážeme, jaký hardware jsem pro projekt Z-Button zvolil a proč.
Použitá platforma
Potřebou je Wi-Fi konektivita a schopnost udělat HTTP (resp. HTTPS) dotaz. Kromě toho potřebujeme jenom jeden GPIO port pro připojení tlačítka. Pro řešení zadání tohoto typu jsou v zásadě dvě možné cesty. V té první se použije počítač s Linuxem, typicky něco malého s ARM, v duchu Raspberry Pi, třeba Zero 2, o kterém byla řeč nedávo. V té druhé se použije mnohem jednodušší a omezenější mikrokontroler.
Pro tento problém jsem zvolil cestu mikrokontroleru. Je to mnohem jednodušší a levnější varianta, počítač s Linuxem je na obsluhu jednoho tlačítka a jednoho HTTP requestu skutečně zbytečně moc. Použití počítače by vyřešilo jediný problém: ověření certifikátu serveru. Nicméně za hodně vysokou cenu. Ani ne tak finanční, jako organizační. Bylo by třeba sofistikovaně řešit deployment, zabezpečení, aktualizace... Proto jsem se rozhodl pro druhou cestu a zabezpečení komunikace vlastními prostředky (o tom bude další díl seriálu).
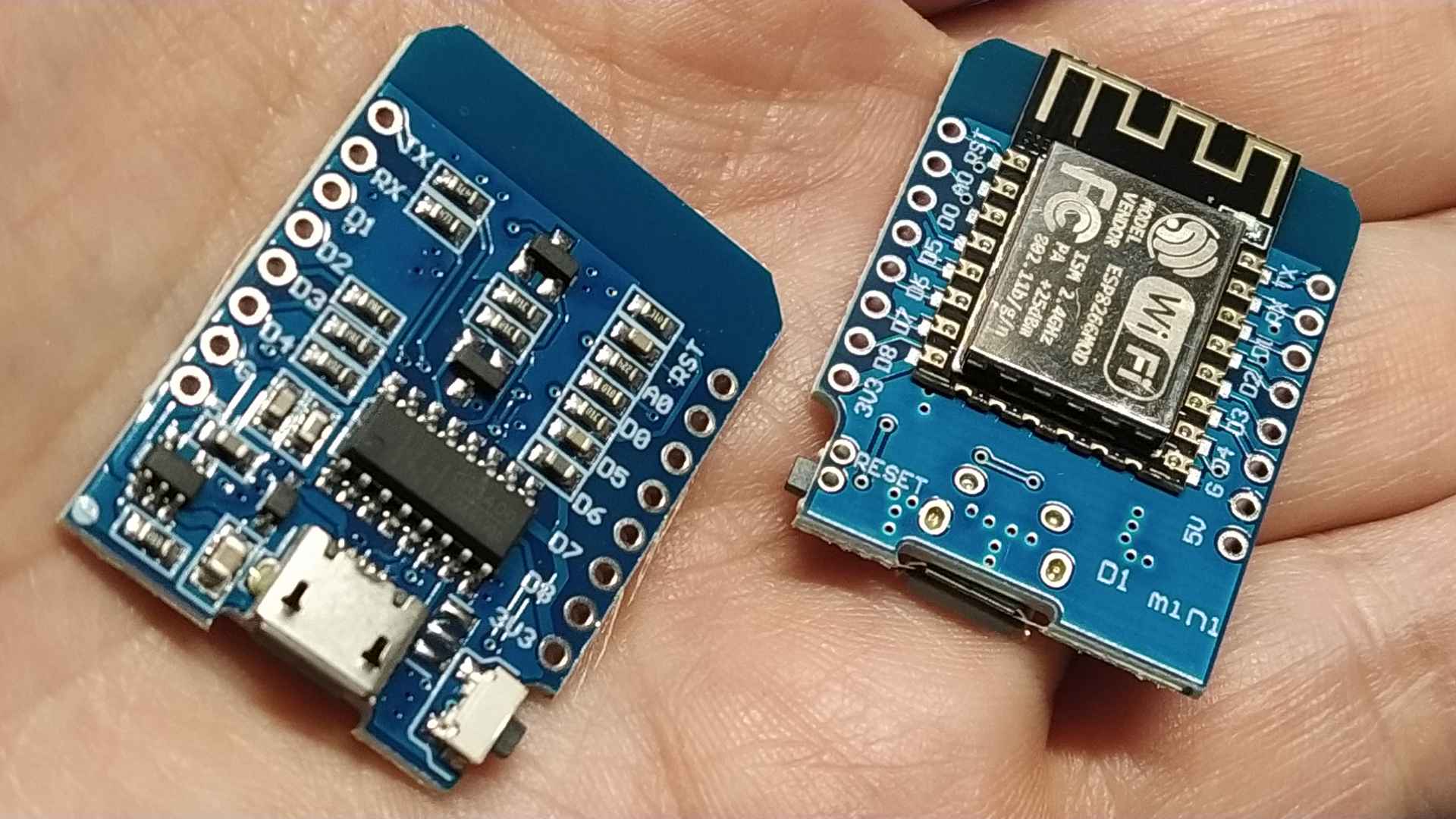
Rozhodl jsem se použít procesor (nebo spíše SoC, system on chip) ESP8266 na vývojové desce Wemos D1 Mini. Bastlířům není třeba ESP8266 nijak extra představovat. Je to stejná platforma, na které jsem postavil svůj projekt HoneyESP a v článku o něm je odkaz na mou přednášku, kde mluvím i o hardware.
Ve zkratce: ESP8266 nabízí 32-bitový RISC procesor běžící na 80 MHz, až 16 GPIO pinů, SPI, I2C, 2x UART a hlavně podporu pro 2,4 GHz Wi-Fi /IEEE 802.11 b/g/n). Dá se programovat v mnoha jazycích, mimo jiné jako Arduino v C, což je přesně to, co budu dělat.
Tento modul k činnosti potřebuje nějaké podpůrné obvody, třeba řízení napájení a podobně. Buďto bych si musel navrhnout vlastní desku (což za prvé neumím a za druhé se to pro tak malý počet zařízení nevyplatí) anebo musím použít nějakou hotovou. Vývojových desek nad ESP8266 je spousta, se všemi možnými parametry. Asi nejmenší z nich se jmenuje Wemos D1 mini. Je snadno dostupná, stojí v Číně desetikoruny, mám jich plný šuplík a hlavně - je maličká, což se mi bude hodit.
Tlačítko a krabička

Trochu paradoxně (ale zdaleka ne výjimečně) bude mechanická část (tlačítko s krabičkou) dražší než vlastní elektronika. První prototyp (vycházející ještě z poněkud jiného zadání a mající vlastní napájení v podobě baterií) jsem dal do běžné elektroinstalační krabičky, kam jsem nainstaloval jakési malé tlačítko, které se mi válelo v šuplíku (mám v šuplících spoustu nejrůznějších tlačítek).

Další prototyp byl od Schneider Electric. To je známá firma vyrábějící kvalitní zboží. Také bohužel drahé, krabička s tlačítkem vyjde skoro na tisícovku. A co je horší, uvnitř není moc místa. Což je pochopitelné, protože do krabiček tohoto typu se obvykle nic nemontuje, jenom se tam natáhne kabel, který se připojí k tlačítku. Nicméně já tam potřebuju schovat i tu desku D1 mini.

Nakonec si mé srdce získal jednodychý noname box z GM Electronic. Sice nemá tak sexy design, ale je výrazně levnější (celé řešení stojí několik stokorun) a v krabičce je více místa, kam se pohodlně vejde D1 mini i USB konektor.
Mechanické provedení
Celou dobu je řeč o stop tlačítku, ale součástí zadání je i varianta s několika tlačítky, která dokáže roboty třeba znovu rozběhnout a podobně. Naštěstí se ovládací skříňky dělají v mnoha vícetlačítkových variantách a celý systém je modulární, takže je možné kombinovat mezi sebou různé varianty a barvy tlačítek a podobně.
Elektrické zapojení je jednoduché. Tlačítko se zapojí mezi GPIO pin a zem. Na D1 mini jsem se rozhodl použít vstupy D5 až D7:
D5- stop (červená), NCD6- žlutá, NOD7- zelená, NO
Tlačítka se vyskytují ve variantách NO (normally open, tlačítko je normálně rozpojené a stiskem se kontakty spojí) a NC (normally closed, tlačítko je normálně spojené a stiskem se rozpojí). Moje řešení počítá s tím, že stop tlačítko bude NC (protože obvykle bývají) a ostatní budou NO. Ale protože se vše vyhodnocuje softwarově je to vlastně jedno, případná změna si vyžádá jednu řádku v kódu.
Napájel jsem tedy krátké drátky do desky a zašrouboval je do šroubovacích kontaktů tlačítek.
Vývod kabelu
Paradoxně největším problémem byla průchodka pro USB kabel, protože běžná řešení nepočítají s tím, že z boxu povede tak tenký kabel (běžně se používají mnohem silnější). Vyřešil jsem to tím, že jsem si vymodeloval vlastní průchodku a vytiskl ji na 3D tiskárně. To se ale nakonec ukázalo zbytečné, protože jsem našel průmyslově vyráběný model, který splnil všechny mé požadavky.